 欲盖弥彰还是技术外行?台电自曝X98Pro使用镁光大S降级片!
欲盖弥彰还是技术外行?台电自曝X98Pro使用镁光大S降级片!
pdf备份:http://pan.baidu.com/s/1ntCHFhn众所周知,台电在本月发布了一款新旗舰产品——台电X98 Pro。当时坤坤觉得不错,圈里的好友也想知道X98 Pro的质量到底如何。所以就买了一台。收到货之后,坤坤第一时间就将其拆机,结果发现了令人气愤的事情!X98 Pro的做工,实在是差到令人发指!坤坤将拆机图发至各大论坛之后均被台电方删除。只有今日头条保留。我不禁想问?拆机贴都要删?台电你到底在怕什么?坤坤随即问了某论坛的管理。答复是这样的:既然台电选择把问题压下去,那么我身为一个有良知的人,绝对不会让消费者蒙在鼓里。随后便在自己微博中晒出了质疑。本想台电继续选择闭眼... 
找到的 armadillo-440 的另类编译环境构架方式
先说一下这个逗比方法用了debian5,而且使用的是日本的源。估计你N多软件包都下载不了的。。。翻了墙连个list都下载不了。而且有问题的,反正最后也是没弄好编译环境。最后只能手动编译交叉编译工具链了,这货提供的还是diff+dl 也是醉了デベロッパーズガイド(Armadillo-400シリーズ編)概要Armadillo-400シリーズ手順概要このドキュメントは、アットマークテクノ社から発売されている、ARMベースの小型汎用CPU ボードArmadillo-400シリーズ(420, 440, 460)上でRTコンポーネントを動作させる方法について解説します。Ar... 
Armadillo-440 交叉编译环境构建
由于官方就没有提供交叉编译工具链 因此走上了不归路这是官方对于deb包出现依赖问题的解决办法 实测对于ubuntu1410 无效。不排除再debian5上有效,没测试。。。Howto : クロス開発用ライブラリをインストールする方法対象製品: Armadillo-500 FXArmadillo-500Armadillo-460Armadillo-440Armadillo-420Armadillo-300Armadillo-9Armadillo-240Armadillo-230Armadillo-220Armadillo-210掲載: 2009/07/27&n... 
Armadillo-440 简介
开发板一览如下 这是一块从日本发来的货 是给物联网之类的使用的 日本一个公司发来让移植sdk 然而交叉编译工具链却没有 从此走上了不归路 这货的cpu是飞思卡尔的逗比U 这个板子是10年出的所以更逗比主频400M arm9 勉强够用吧 跑的debian 这公司最新的好像是800M的A9 也同样是飞思卡尔的 soc上还有个大大的china。。。。。。 基本情况就是这样了 开发文档全日文 而且说道构建交叉编译环境 竟然只是安装deb包 而且在ubuntu141... 
探究:AR/QCA 芯片通过 APB 访问内置交换机寄存器
http://blog.hackpascal.net/ 原文链接从 AR9341 开始,AR/QCA 芯片的 datasheet 上都会列出一个寄存器的某一位的作用:其中提到:设置 0x18070000 寄存器的第9位 (SW_APB_ACCESS) 为1,可以从 APB——也就是通过内存地址访问交换机的寄存器而不是通过MDIO来访问。但是 datasheet 通篇没有提到设置后交换机的寄存器将被映射到的内存地址基址。根据 AR/QCA 芯片的 APB 布局来看,旧的布局不会改变,要改变只会改变新的未使用的地址。QCA9531 的 APB 布局:通过观察可以发现 APB 新增的寄存器映射地址都... 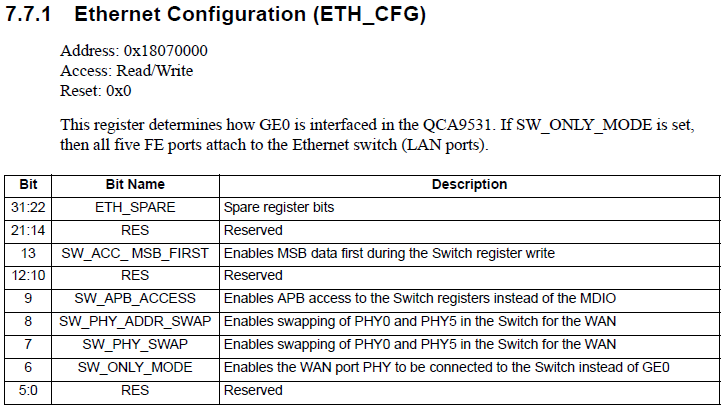
APM2.5飞控多种飞行模式简介
APM2.5飞控支持很多种飞行模式,这里我们根据初学者入门和应用场合从多到少的顺序,来进行简要介绍。 1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。 此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。 一定要确保遥控器上的开关能很方便无误地拨到该模式,这对抢救紧急情况十分重要! 2、定高模式ALT_HOLD 初次试飞之后就可以尝试定高模式,此模式不需要GPS支持,APM会根据气压传感器的数据保持当前高度。 定高时如果不会定点,因此飞行器依然会漂移。可以遥控来移动或保持位... 
APM2.5主要LED指示灯简介
我们根据飞控板图进行描述: -在飞控板右下角GPS模块接口旁边,有Alive灯,当通电时(不论动力电还是USB接通)会常亮; -它旁边并排着TX和RX灯,在有数据传输时会快速闪烁,比如用USB线和电脑地面站软件连通了,或者数传电台在通信时; -飞控板左下角,输出排针下方,并排有A、B、C三个指示灯。 -A灯最关键,它闪烁代表飞控处在Disarm(未激活)状态,动摇控器的油门不会启动电机。只有把摇控器方向舵打到最右保持4秒以上进行激活,A灯会变为常亮,表示当前处在激活状态,可以飞行。在地面调试、移动时,要确保A灯处在闪烁状态,以免出现危险; -B灯... 
APM2.5介绍
APM飞控板是近来新兴的飞行控制设备,能够根据需要设置为固定翼模式、多轴飞行器模式、甚至直升机模式。在普通的固定翼或直升机航模上安装APM,可以升级航模为“无人机”,实现自主飞行,同时通过地面站发布指令和随时监控飞行器状态。而在多轴飞行器上,它还是保证飞行器平稳飞行的必要控制核心。APM目前版本为2.5,性价比很高,是希望涉足“无人机”领域的爱好者的不错选择。 APM是开源软件,网上的Wiki有大量信息介绍其内容,而且还在不断更新中。 
APM2.5试飞和调整
试飞一定要在空旷无人的场地进行,安全永远是第一位的!应选择无风的天气,温度不要在0度以下,因为APM对温度也很敏感。试飞先不要安装GPS,可以按照以下步骤进行: 1、开发射机,油门在最低位置,5通道三段开关在Stabilize模式位置; 2、接动力电源,等待电调自检完毕。APM板输出端附近有个红灯(A灯)闪烁(APM2.5板上的LED指示灯,将有其他文章介绍)。表示目前为DISARM状态(未激活)。此时摇控器油门加大,飞行器不会有动作。 3、将方向舵打到最右4秒以上。APM板上A红灯将停止闪烁保持常亮,此时飞行器进入ARM状态,已经激活,轻推油门螺旋桨应同时转动。如果ARM之后较长时间没有起... 
四轴飞行器APM2.5飞行前设置步骤
Wiki上有首次设置的过程,也有软件安装的介绍,还有一些设置分布在各个不同文档里,这里进行一下精简整合介绍,请按以下顺序进行: Mission Planner 来源:Wiki 1、安装软件。 软件名称叫做“Mission Planner”,就是“任务规划器”,简称“MP”。这个软件本身就是飞行器的“地面站”,可以实时监控、设定飞行器状态、设定航点线路,也用来设置APM板的各项参数。 建议大家使用Windows7来安装软件。用WindowsXP也可以,但是需要首先装微软的“.NET 3.5”,而且我在使用过程中还碰到跟数传电台不兼容的问题,还是Win7好些。软件的下载和安... 
Sxx1314

站长:沁雨寒
签名:扫描关注微信公众号
签名:扫描关注微信公众号
最新日志
热门日志









